Use cases
The first time the hardware control module is initialized, it will show a dialog to choose the hardware setup to be loaded. The user can change the setup option during execution in “Tools” -> “Pick hardware setup…” in the hardware control module’s menu bar.
Parallelized confocal and RESOLFT (MoNaLISA)
Here we explain how we implemented ImSwitch for MoNaLISA. In the article, you will find more information about the setup and how the data is reconstructed.
Configuration file and MoNaLISA hardware specifications
For this microscope use case, we created the JSON file example_monalisa.json, located at /imswitch/_data/user_defaults/imcontrol_setups/example_monalisa.json
We chose a National Instruments Data Acquisition (NIDAQ) card for managing the synchronization of the devices.
In the JSON file, two cameras are specified for two-color imaging: Green and Red.
Both cameras are Hamamatsu, so they use HamamatsuManager. All the required camera properties are defined there,
like the DAQ digital line for external triggering, readout speed, exposure time, field of view, etc.
There are five lasers in this setup, we use acousto-optic modulators (AOM) connected to the DAQ to control some of them,
and others need the vendor interface as well, in this case Cobolt. The specific manager is defined for each type, LantzLaserManager or NidaqLaserManager, (see Hardware Control Configuration).
We use a X-Y-Z stage that we control through the DAQ as well, so the axes are defined as positioners using NidaqPositionerManager. The analog lines and conversion factors are specified as well.
The modules that will create the signals for the scan are BetaStageScanDesigner for the Stage, and BetaTTLCycleDesigner for the instrument synchronization.
Other config parameters related to scanning, regions of interest (ROI) and a list of widgets to be loaded are added in this file.
Hardware control module
This module is useful to control the hardware and screen the sample using widefield or our other patterns. We have provided a more detailed explanation of the GUI here. To record a super-resolution image the user sets the camera to external-trigger mode and inserts the scan pulse scheme. The scanning module synchronizes the different instruments through the DAQ, and the raw data is displayed in the liveview.
The user can choose to save the raw data either in disk (hdf5) or RAM (or both) using the Recorder widget. So, for example, we program our scan and then click “Scan Once” in REC to start our acquisition. The metadata is also saved in the hdf5 and can be reloaded from the toolbar. It contains all the scanning pulses and hardware parameters related to the experiment.
GUI while using two-color widefield:
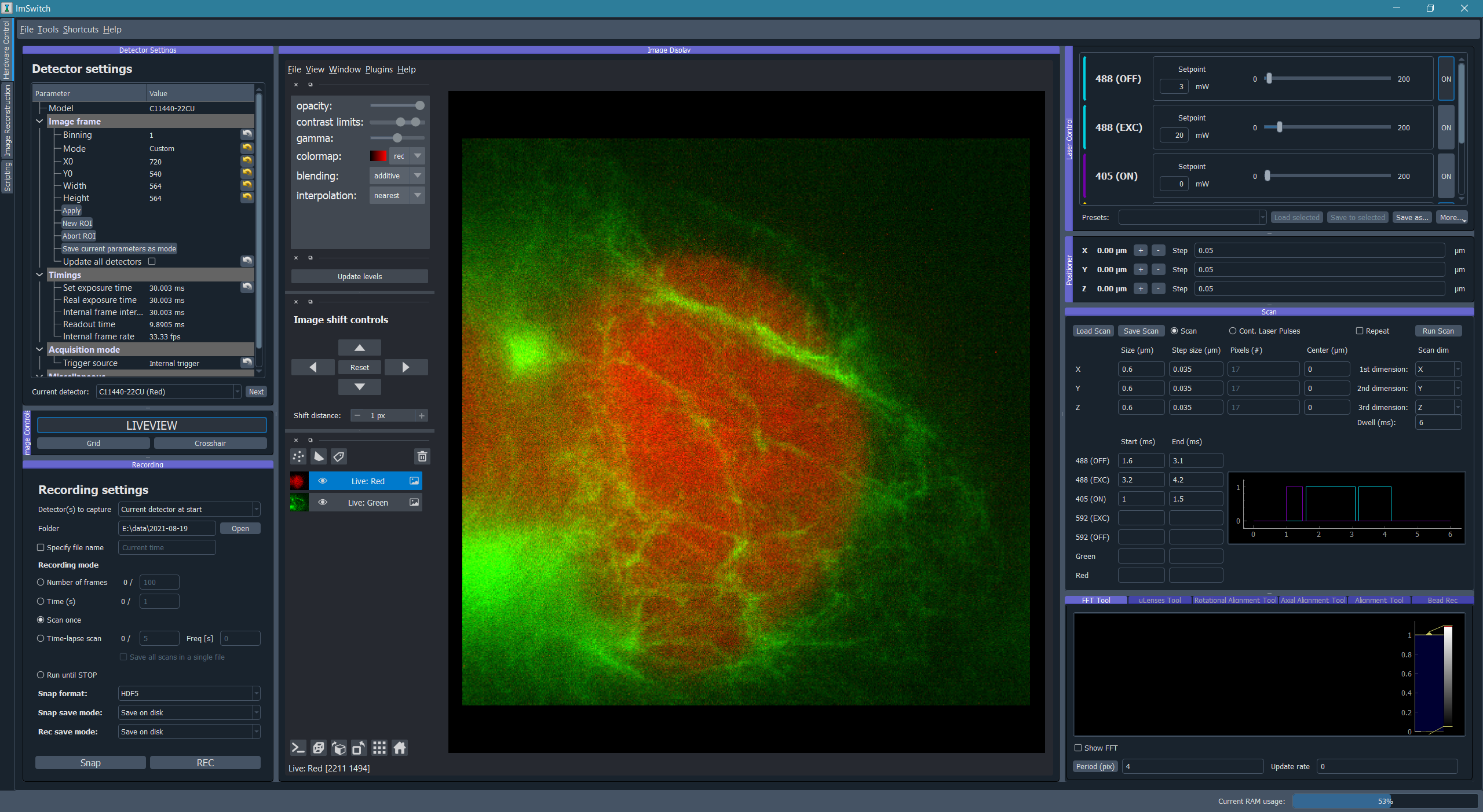
Image processing module for image reconstruction
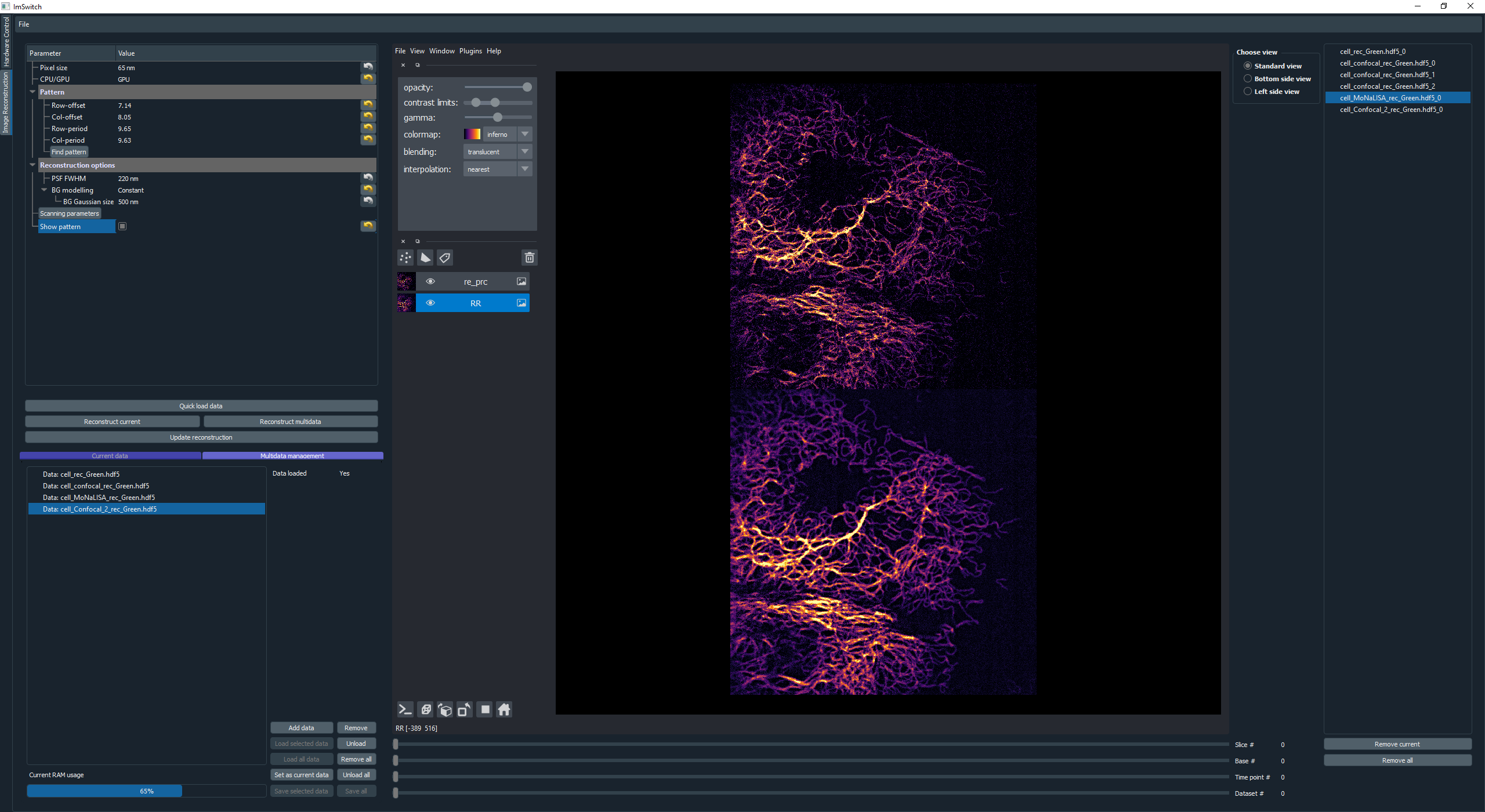
The raw data can be either manually loaded into the reconstruction module or automatically retrieved from the scanning if selected in the Recording widget. The user can further analyze the data using Napari image viewer. In this module we use our custom-designed DLLs for reconstruction, since this is a rather specific type of algorithm for our method. But the idea is that different microscope techniques implement their own modules as well. “Multidata management” stacks all the data incoming from the hardware control module.
The Image processing module is illustrated in the following image:
Point-scanning confocal and STED
Here we explain how we implemented ImSwitch for a custom-built STED setup in the lab, previously controlled by a combination of closed-source software (image acquisition) and purpose-built software (hardware control). In the article, you will find more information about the setup, what hardware it contains, and the type of image acquisition we want to perform.
Configuration file and STED hardware specifications
For this microscope use case, we created the JSON file example_sted.json, located at /imswitch/_data/user_defaults/imcontrol_setups/example_sted.json
We chose a National Instruments Data Acquisition (NIDAQ) card for managing the synchronization of the devices and image acquisition.
In the JSON file, two photon-counting point detectors (APD) are specified for two-color imaging: APDGreen and APDRed.
These do not need any specific hardware control, but instead are read entirely through the Nidaq.
Additionally two cameras are specified: one for widefield, for having an overview of the sample, and one for the focus lock, as described in detail in the cited article.
Both cameras are The Imaging Source cameras, so they use TISManager. All the required camera properties are defined, like the camera index in the list of cameras, exposure, gain, brightness, and chip size in pixels.
There are three lasers in this setup, and all three have an associated AOM or AOTF to rapidly control the power, and hence there are six laser devices defined. Two of them controls only fast digital modulation through digital Nidaq lines (561 and 640 lasers); one controls fast digital modulation and analog modulation through digital and analog Nidaq lines (775AOM); one controls the 775 nm laser through RS232 communication and hence has an associated rs232device (775Katana); and the last two controls the power modulation of the multiple channels of the common AOTF for the 561 and 640 nm lasers through RS232 communication with an associated rs232device (561AOTF and 640AOTF). The speicfic manager is defined for each device, NidaqLaserManager, AAAOTFLaserManager, or KatanaLaserManager.
We use galvanometric mirrors for the XY-scanning that we control through the DAQ, so the axes are defined as positioners using NidaqPositionerManager. The analog lines of the Nidaq used and conversion factors, for converting µm of the user-input to V for the signal, are specified as well. Additionally a piezo is used for Z-movement, controlled both through analog signals from the DAQ with a NidaqPositionerManager and through RS232 communication with a PiezoconceptZManager.
The modules that will create the signals for the scan are GalvoScanDesigner for the XY-scanning, and PointScanTTLCycleDesigner for the laser synchronization. The analog scan designer will create smooth scanning signals with linear acquisition regions for good control of the galvanometric mirrors. The TTL designer will create laser modulation signals that can be controlled on a sub-line level with the widget interface, with automatic turn off during the portions of the scan that are not during acquisition.
The Hamamatsu SLM used in the setup is managed through the SLMManager, and is simply controlled by connecting it as a monitor and showing a gray-scale image with the pixel values corresponding to the phase-shift you want to impose. The manager is responsible for building this image based on the user-input from the widget.
The focus lock does not have a separate manager, but instead is associated with one of the TIS cameras and the Z-piezo rs232device. The properties for the focus lock specifies what hardware devices it should associate with, what part of the camera frame should be cropped, and the update frequency (in Hz) of the PI control loop.
The RS232 communication channel protocol parameters necessary for the control of the hardware devices requiring so are also defined in the same file.
Other config parameters and a list of widgets to be loaded are added in this file as well.
Main module
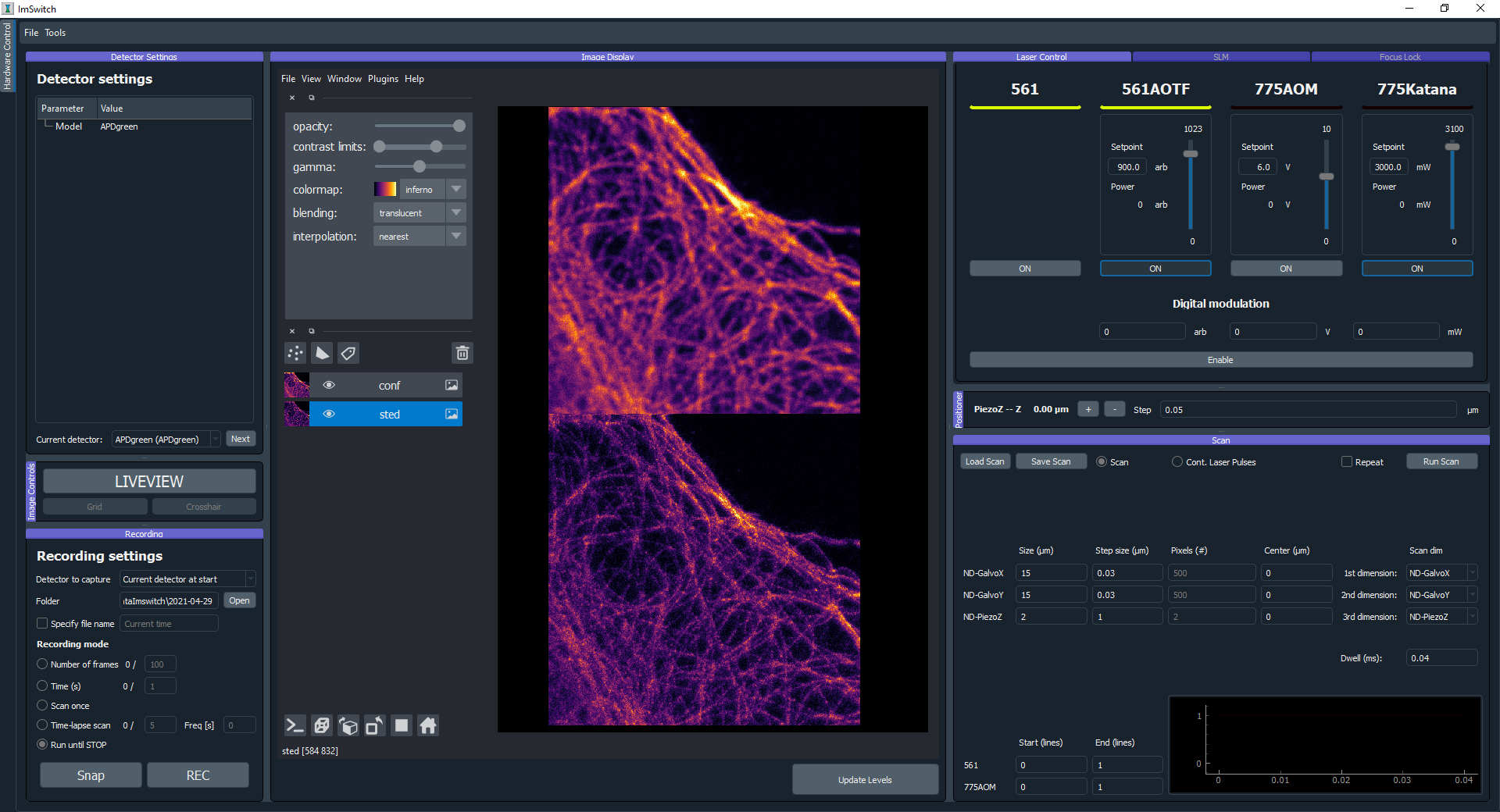
The main, and only, module for this use case is used to control all the hardware, screen the sample with widefield, acquiring the images, and inspecting them with the visualization tools. We have provided a more detailed explanation of the GUI here. To record a confocal image, the user sets the scan parameters that they want for each scan axis (length, pixel size, center position), the pixel dwell time, sets the laser powers they want to use, set the TTL start to 0 and end to 1 (units is lines) for the excitation laser they want to use, and runs the scan. The view of the detectors not in use can be hidden in the visualization tool. The scanning module will build the scanning curves, laser modulation curves, create those tasks in the Nidaq, and start them. The raw data is displayed in the liveview, where the image is updated line-by-line during the acquisition. For recording a STED image the procedure is much the same, with the addition that the use turns on the STED laser in the laser module, and sets the corresponding TTL start and end to the same values, and runs the scan. Before this the SLM has to be configured in order to create a desired depletion pattern, where for using a donut and tophat there are helpful tools in the SLM module to align the mask and the aberration correction that will be specific to each setup.
Previous to any image acquisition, while using either a repeating fast confocal scan or a widefield image, the sample has to be set in focus, and the focus lock can then be used to lock the sample in the focal plane. The focus lock acts independent from the image acquisition and can be continuously turned on for as long as wanted.
The user can choose to save the acquired image to a desired folder and with a desired name by using the Snap button in the recording widget. It will be saved in hdf5 format, and will include all user-defined parameters from the GUI as metadata. Functionality to reload metadata parameters from a previously saved hdf5 file can be found in the toolbar, for easy and precise recreation of a previous experiment. Previously recorded images in tiff format can also be loaded in the visualization module in order to be directly compared with the last recorded image or each other.
GUI after having acquired a confocal and a STED image:
CoolLED control through USB and TTLs using a NIDAQ
We got a CoolLED (https://www.coolled.com/) in the lab and decided to try ImSwitch out in a setting where we want to control the 8 lasers of the device, both by doing it manually using the sliders and buttons (using a USB port and RS232 communication protocol), but also being able to design and perform a sequence of TTLs and a X-Y-Z Stage controlled by a National Instruments card. This use case could be combined with the Napari viewer and a camera, or a point scanning system, or any of the other widgets explained in the other Use Cases.
All the lasers are listed in the JSON file example_coolLED.json, located at /imswitch/_data/user_defaults/imcontrol_setups/example_coolLED.json, by specifying:
Digital line of each laser in the NIDAQ.
Wavelength and range (0 to 100).
Channel name (A-H), each corresponding to the laser.
The Positioners define the stage axis with the settings, such as:
Analog channel of the NIDAQ.
Conversion factors.
Min and Max voltages.
Axis (X, Y, or Z).
Then, the CoolLEDLaserManager will communicate with the RS232Manager for sending the intensity and on/off commands. The parameters of the RS232Manager are the typical ones
of a RS232 connection, such as:
Port (Usually COMx).
Encoding (ascii).
Baudrate (57600).
ByteSize (8)
Parity (None)
Stop bits (1)
The pulses will be directly handled by the National Instruments card and our TTLDesigner.
Optical Projection Tomography (OPT) using stepper motor
contact: David Palecek (CCMAR, Portugal), Teresa Correia (CCMAR, Portugal)
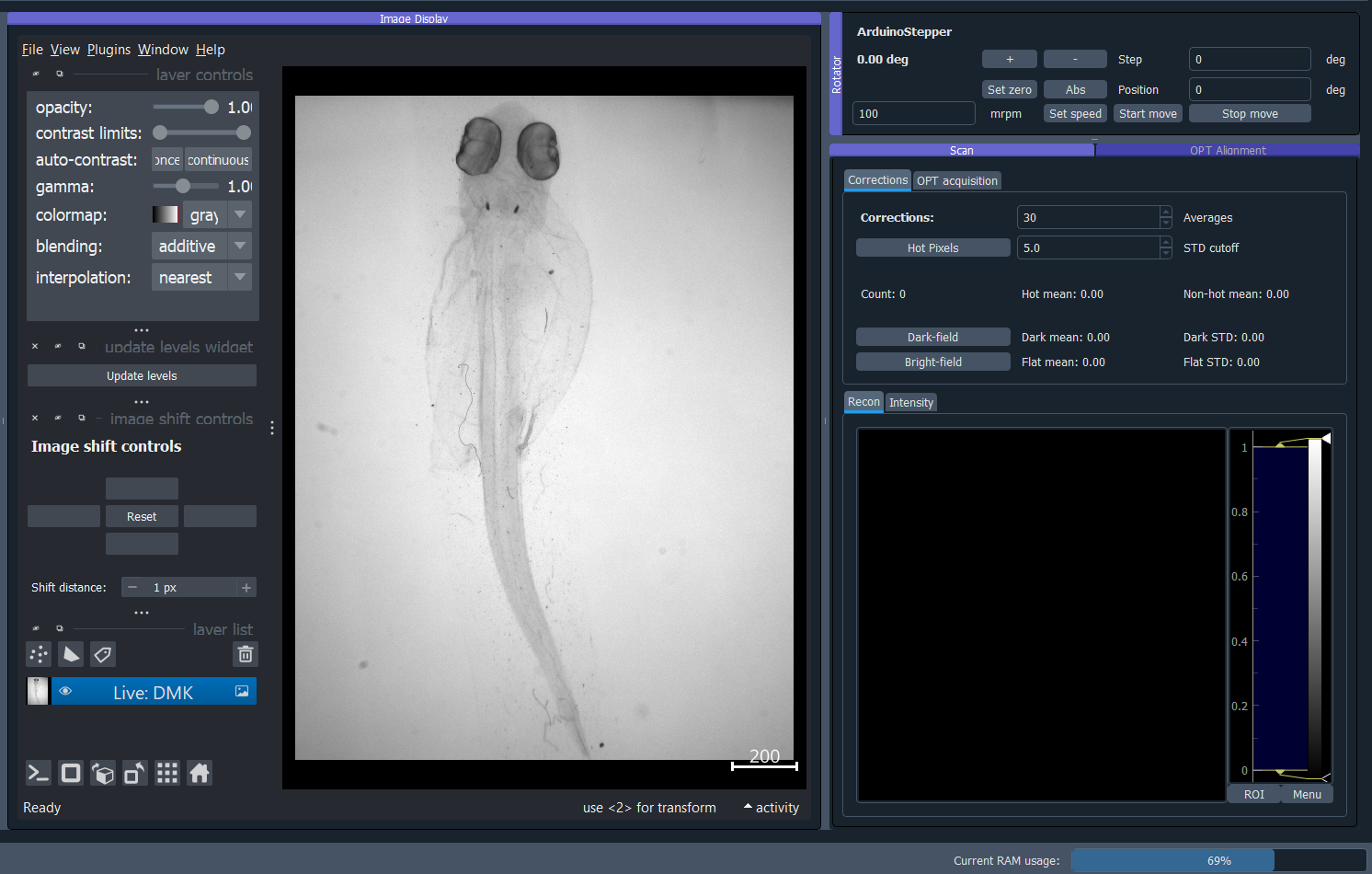
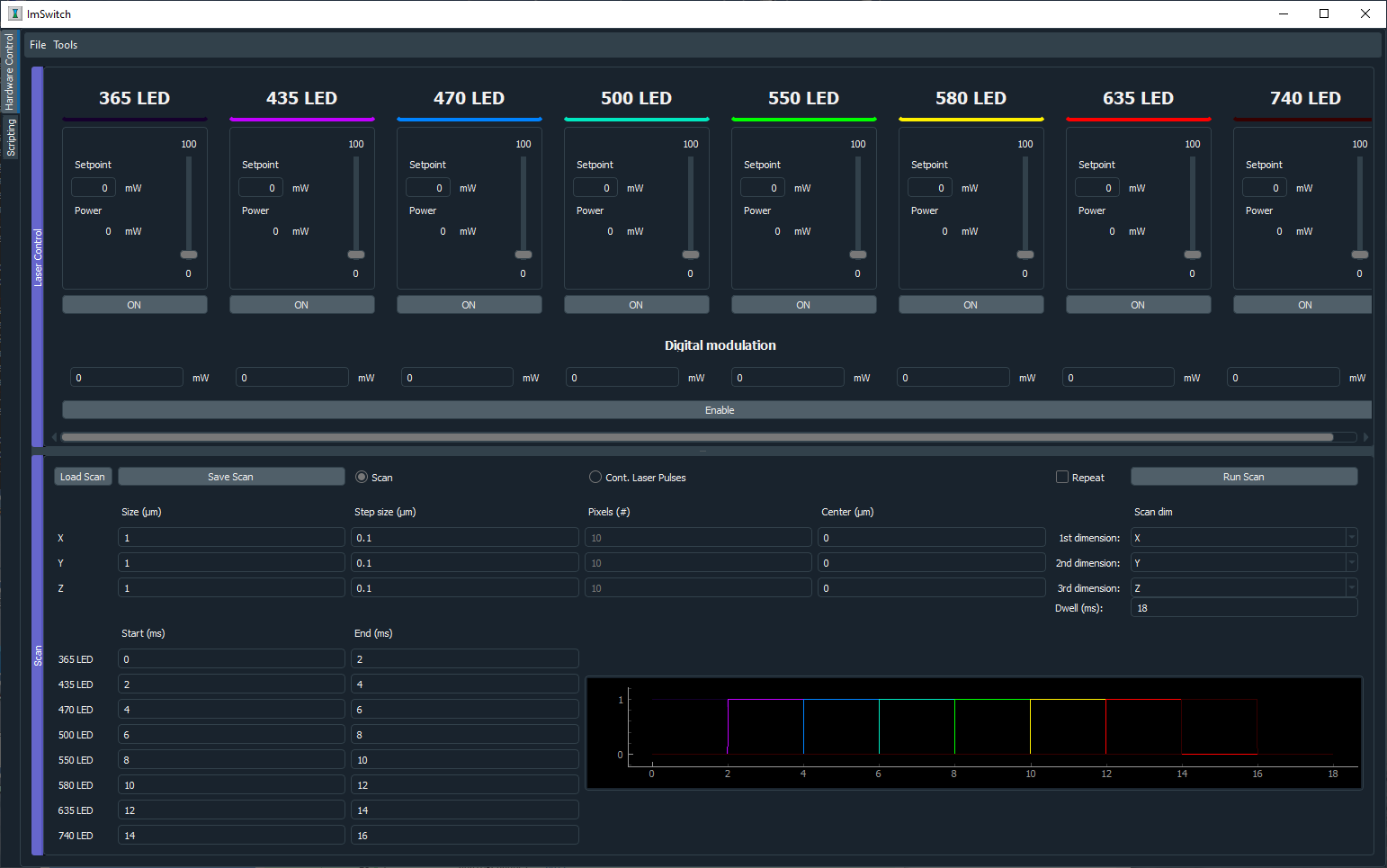
Fig. 1 OPT in imswitch in action using example_OPTFull4Wire.json configuration file.
Optical Projection Tomography (OPT) is an optical analogue of X-ray computer tomography used in medical imaging. OPT can be performed leveraging any microscopy contrast, most widespread used ones are transmission, fluorescence or polarization. ImSwitch implementation aims to provide user-friendly access to end-to-end pipeline for the OPT, which consist of these indispensible steps:
Hardware control and data acquisition
Data preprocessing
Tomography volume reconstruction (CPU and GPU, FBP and Deep Learning)
All of them can be performed within ImSwitch, since step 2. and 3. are implemented as napari plugins.
OPT Hardware control
The setup consists of collimated light-source, diffuser, sample mounted on a rotational stage, in the refractive index matched medium and infinity corrected objective imaging the 2D projections onto the CMOS camera. All elements are aligned on the camera optical axis.
Configuration file and OPT hardware specifications
For this microscope use case, we created the JSON file example_OPTFull4Wire.json,
located at /imswitch/_data/user_defaults/imcontrol_setups/example_OPTFull4Wire.json.
In the JSON file, one detector is specified for the imaging: DMK 37BUX252 is controlled by TIS4Manager set for
gray-scale 12bit frame acquisition. The exposure time is defined in us for TIS4Manager, however
many other managers might use ms.
The rotational stage is controlled via TelemetrixRotatorManager, which controls the Arduino board.
Configure your pin connections via piConfig in the configuration file. The number of steps per revolution of the
motor is set by stepsPerTurn parameter.
Scan widget type is set to OPT and the rest of the parameters are not important. optInfo serves the purpose of
specifying hardware, which is to be used for OPT, in case many cameras and rotators are connected.
Camera control
Camera is software-triggered in the snapping mode. The exposure time is set in the settings widget on the left.
Technical note: Wait constant before image snap is set equal to exposure time in order to avoid blurring of
images for long exposure times, since snap retrieves last frame in the queue, therefore the request
is delayed by the waitConst attribute value. It can be changed only in the source code at the moment in ScanOPTWorker
class.
Rotational stage control
The rotational stage is a stepper motor, which can be 2 phase or 4 phase. The number of steps per revolution needs to be provided in the json configuration file. The motor is controlled by the Big Easy Driver and Arduino. Library used was telemetrix, which is python interface based on accellStepper library.
Great resources for the Arduino stepper motor control and wiring can be found for example here:
Tested HW
Cameras:
TIS DMK 37BUX252 (USB industrial grade camera,
TISManager,TIS4Manager),TISManageruses older ic3.5 API, whileTIS4Managerimplements the newest ic4 API (Programmer’s guide), which should support most of the TIS cameras.
Rotational stages:
Simple stepper 28BYJ-48 (comes with Arduino UNO,
TelemetrixRotatorManager), 2048 steps (beware, the gears might be off). It has a magnetic shaft, which is convenient for sample mounting, however the motor is quite useless for OPT due to the low precision and shaft crookedness.Nanotec ST4118M1804-L (4 phase stepper motor,
TelemetrixRotatorManager), 3200 steps, good quality, backlash free, but requires a driver, we used BigEasy driver.
Please help us improve and open issues or ask help to implement your own hardware. Or report to us successful implementations of your hardware to share it here.
Alignment widget
Rotational axis of the motor shaft as well as the sample needs to be as close to perpendicular to the optical axis as possible, while also aligned on the central column of the camera chip. Even though the center of rotation (COR) is always corrected for in the reconstruction step, for depth of field and resolution reasons it is highly beneficial to have the sample as centered on the camera as possible. Therefore we provide an alignment widget to help with all these tasks.
Full Example
In the full example, we start with motor shaft alignment alone in respect to the camera field of view without the sample. This does not need to be done every time, however tilt of the shaft along the optical axis or in respect of the camera chip is detrimental to the image quality and should be checked from time to time, depending on the robustness of the sample holder and experimental resolution.
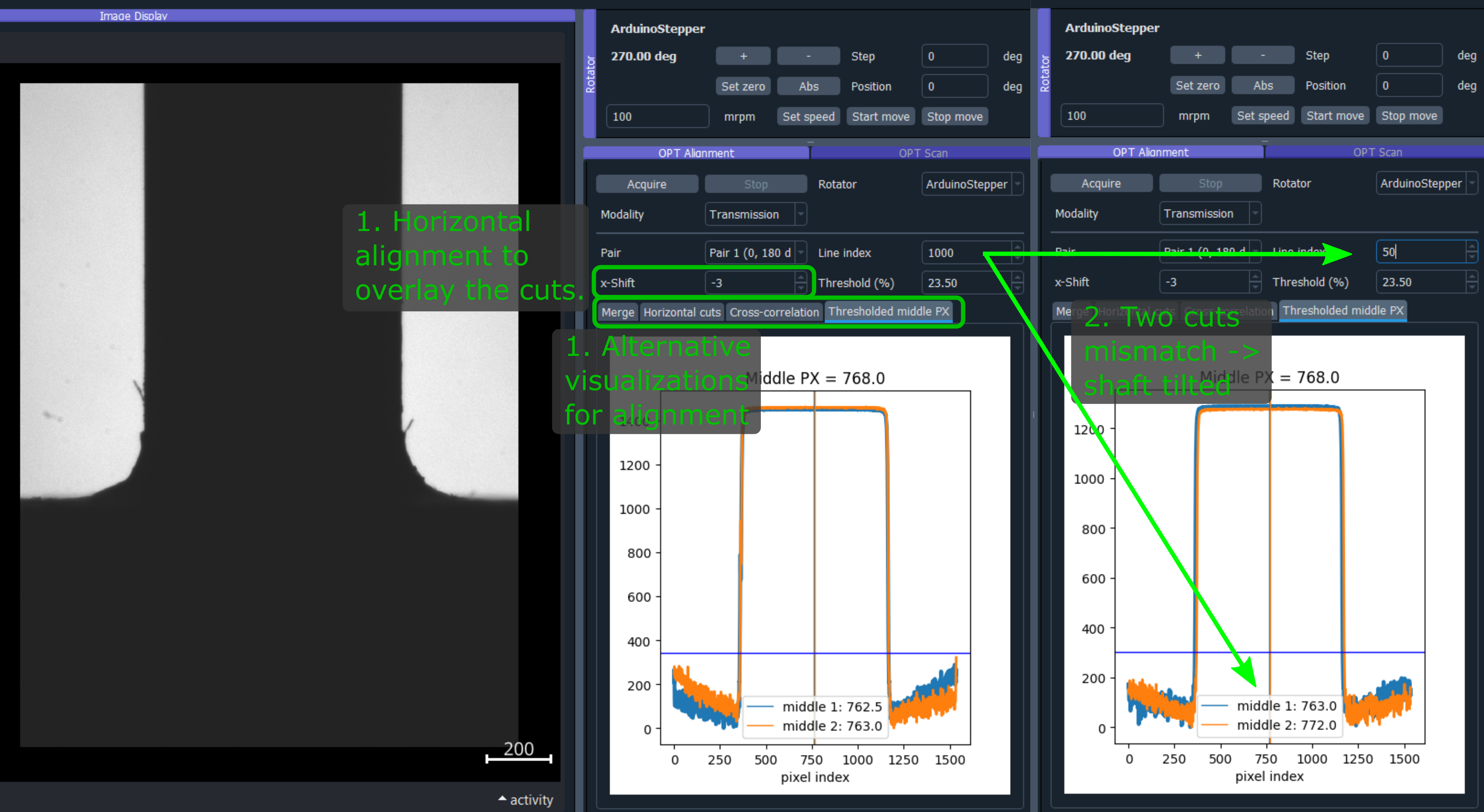
Fig. 2 OPT alignment widget with the alignment of the centering shaft and its sideways tilt in progress.
Make the shaft span vertically most of the camera chip.
Acquire 4 projections by pressing
Acquirebutton in theOPT Alignmentwidget.Select a row the slices, if you see a step function in the merge, the shaft is off the chip center.
The
x-shiftandthresholdallows to figure out the misalignment of the shaft.Shift and reacquire until the H-cuts overlay with 0 x-shift (see details in figure Fig. 2).
For the tilt correction, the motor is mounted on Kinematic Platform Base, which allows for independent alignment of a shaft tilt along the optical axis and perpendicularly to it.
For sideways tilt, alternate between two H-cuts, which are close to the bottom and top of your camera field of view, respectively.
The center pixels of these two H-cuts need to be the same in case of no tilt. Adjust the tilt, and re-acquire until match is achieved.
Result of the two above procedures is shown in figure Fig. 3.
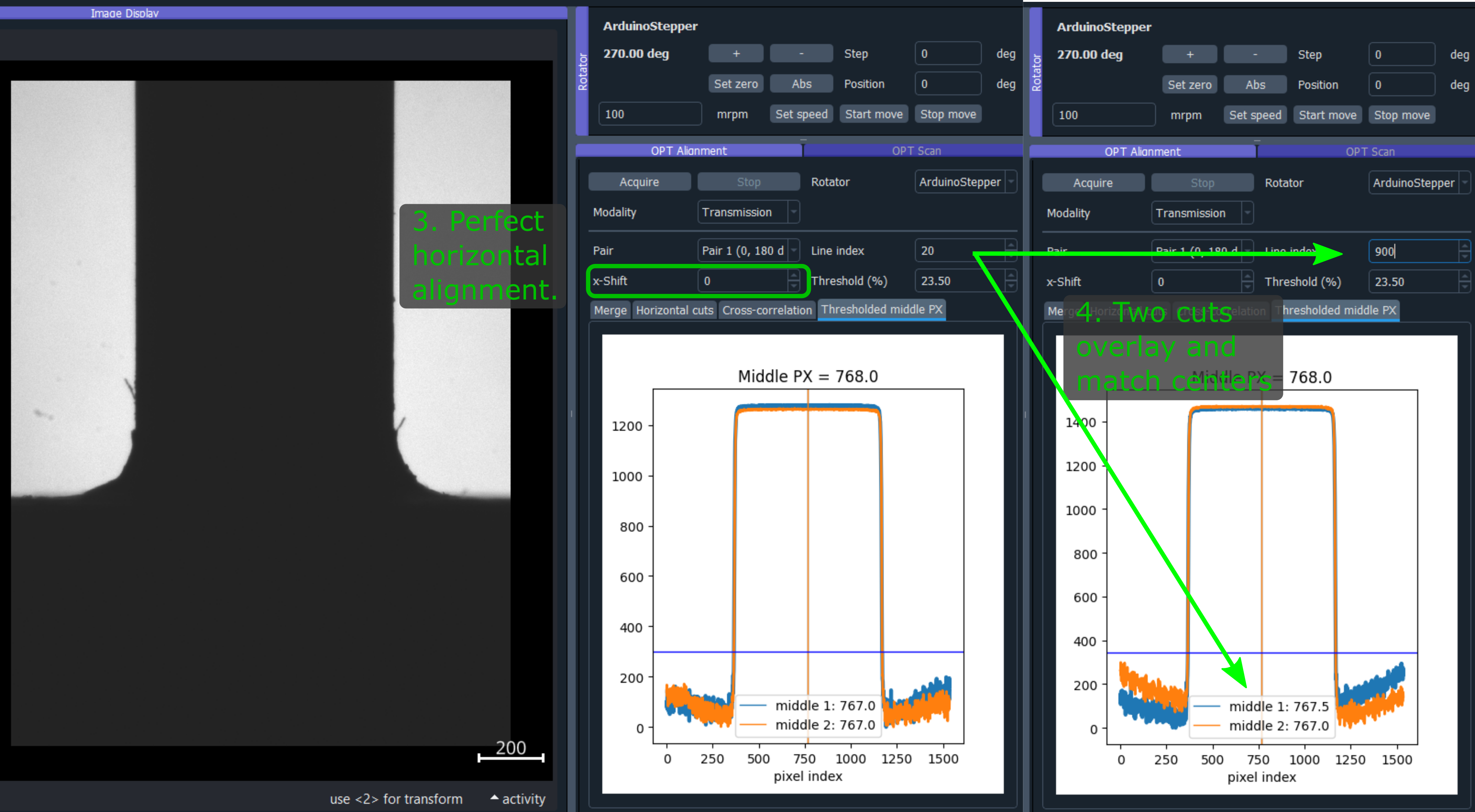
Fig. 3 Alignment of the shaft tilt along the optical axis.
You can approximately check the tilt along the optical axis too. The procedure is demonstrated in figure Fig. 4. #. Attach a rigid flange to the motor shaft. #. Adjust the height of the flange so that the top edge is close to the central line of the camera. #. Change focusing to the front and back edge of the flange. #. If the shaft is tilted away from the camera, the flange further from the camera will be clearly visible in the image once brought to focus. #. On the other hand, if the shaft is tilted towards the camera, the far-away flange will never be visible. #. Adjust the tilt, that the close and far edge of the flange are aligned in height, and perfectly shadowing each other.
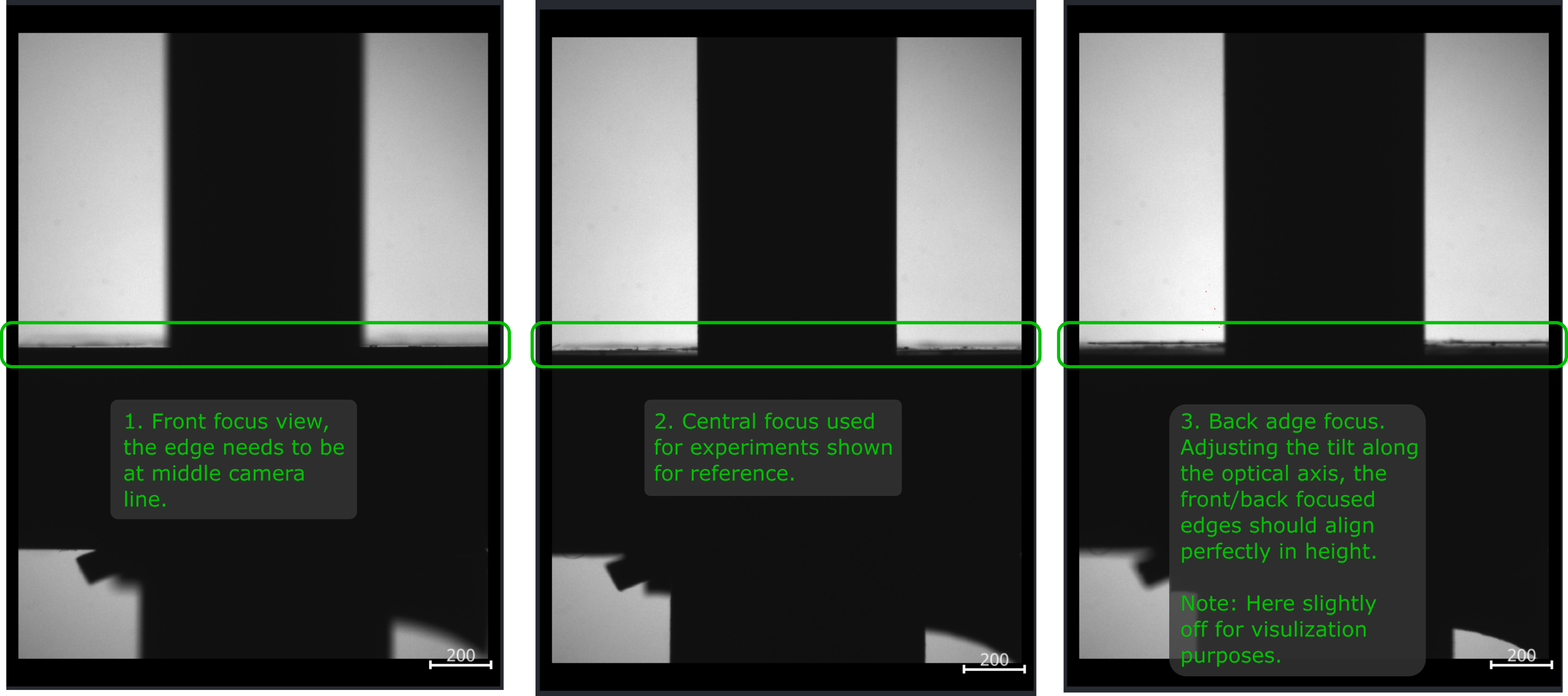
Fig. 4 Alignment of the shaft tilt along the optical axis.
Now the motor is perfectly align, however after mounting the sample, the sample needs to be centered in respect to both the motor shaft in an analogous procedure as described above.
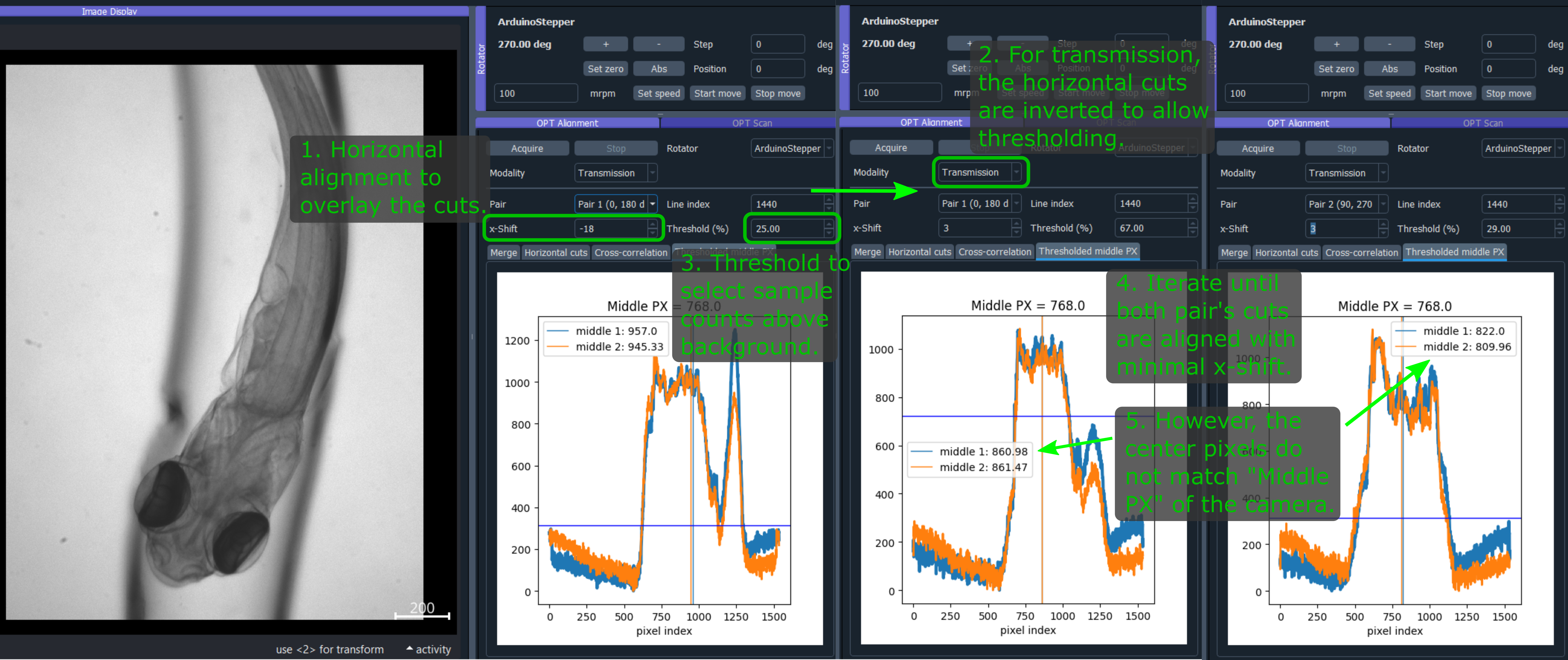
Fig. 5 Sample alignment in respect to the camera chip.
Now we describe the sample and motor COR alignment (not tilts), which, importantly, does not require the motor shaft in the camera FOV. The alignment procedure starts with acquisition of two pairs of counter-projections, ie. 0-180 and 90-270 degrees. With perfect alignment, each pair is essentially a mirror images to each other. The property which we take advantage of in the following alignment steps:
We flip one of counter-projections and overlay horizontal cuts (H-cuts) for user selected camera line.
Use shift in x-direction to align the two images (H-cuts), the metric can be visual inspection, cross-correlation or mean central index calculated using thresholding of the cuts with the threshold parameter.
The misalignment from the central camera pixel can be calculated as pixel_size * x_shift in micrometers.
Move the motor shaft horizontally and repeat the acquisition until the two images are perfectly aligned.
Only one pair of the counter-projections is needed to center the motor shaft on the chip.
At this point, the motor shaft is aligned in respect to the camera chip (figure Fig. 5). The next objective is to align the sample in respect to the motor shaft. Although the mean pixels for the counter-projections coincide, they most probably do not coincide with the center pixel of the camera, which is an indicator that sample is not aligned with the motor shaft. See figure Fig. 6 and the following steps for details.

Fig. 6 Sample alignment in respect to the motor shaft.
For curved sample, select camera line, which is you intend to use for the alignment.
Acquire the counter-projections of the sample.
Use the threshold (in percents of the maximum intensity counts) parameter to track the mean position of the sample, while discounting.
Select correct modality for correction, transmission data need to be inverted for correct thresholding.
Move sample in X and Y direction in respect to the shaft iteratively until the the center pixels of both counter-projection pairs are as close to the center camera pixel value as possible.
We use magnets which can be slid in respect to each other for that.
This effectively leads to centering the sample in the center of the reconstructed volume, which results in optimization of the minimum steps for obtaining fully sample OPT dataset, while minimizing required DoF for the imaging at the same time.
OPT acquisition
Supposing the motor shaft is aligned in respect to the camera chip, align the mounted sample in respect to the motor shaft in an analogous way as described above. After the alignment, the acquisition itself is trivial. Define number of OPT steps you want to acquire. Note: If the number of steps does not divide the number of motor steps per revolution without remainder, confirmation will be requested whether to proceed with the acquisition. If yes, you introduce certain rounding error casting the requested steps (real numbers) to the ones of the motor (integer numbers). Ee have not tested experimentally, how big of an effect this has on the resulting reconstruction.
For live reconstruction, define the row index, which will be reconstructed in real time. If the index is out of range, central row of the camera will be reconstructed.
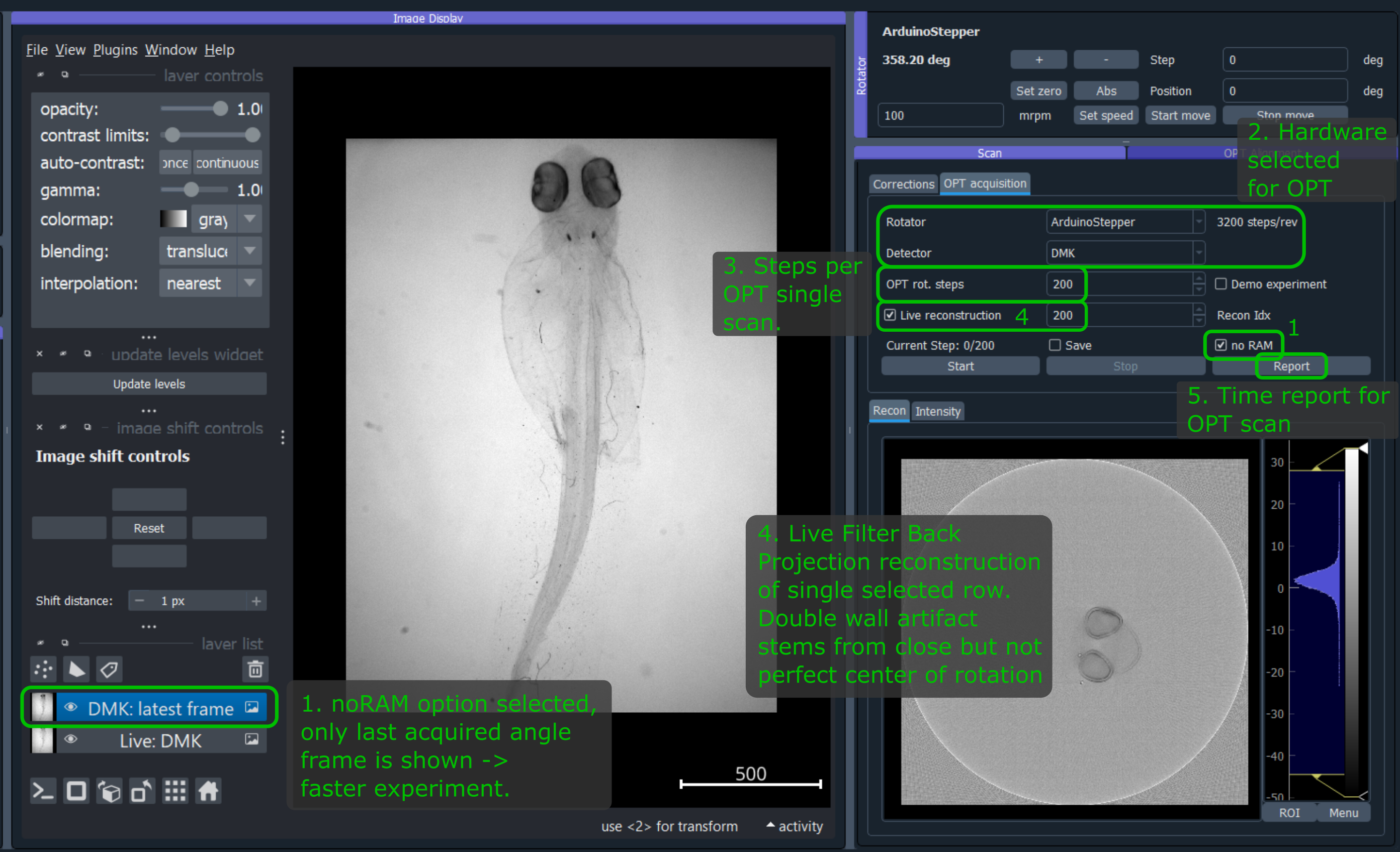
Fig. 7 OTP acquisition widget with live reconstruction in progress.
Select whether to save the data (to the recordings folder), the folder name is a datetime string.
By default all projections will be also kept in RAM for postprocessing and napari viewer will display all
acquired projections so far in a 3D stack. This can be disabled by checking the noRAM option, which
results in faster acquisition, but only last projection will be displayed in the viewer during the OPT
acquisition.
At this time, only tiff` format is supported for saving the data. Metadata are saved in metadata.json for every
OPT acquisition scan. The metadata contains all the information about the acquisition, as well as hardware settings, with
the exception of optics/sample description. Metadata file is saved in the same folder as the images in the recordings folder.
OPT experiment begins after pressing Start button.
You can check the time per acquisition operation in the report, looking similar to the one below, which is also saved in the metadata file.
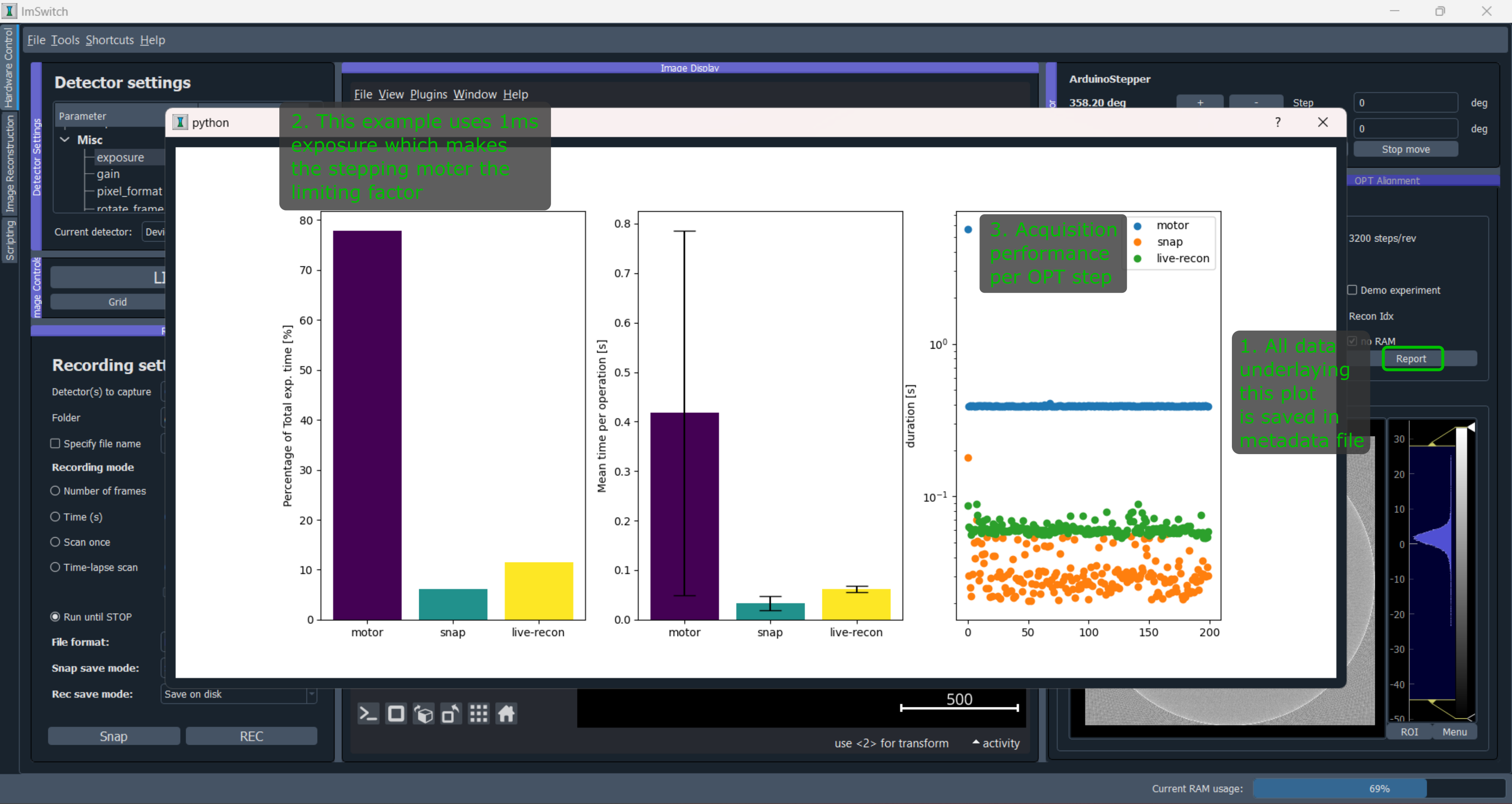
Fig. 8 Acquisition time tracking report.
Corrections
Correction are saved always in the recordings/corrections/ folder.
All corrections are subjected to averaging set by the Averages parameter.
The hot pixel correction can be used to identify both hot pixels (relevant for fluorescence acquisitions with long exposures), as well as dead pixels (relevant for bright-field acquisitions with short exposures). For hot pixel correction, use as long exposure as possible, to make the hot pixels visible. The STD cutoff is used just to provide illustrative information on how many hot pixels are detected. None of that information is saved or is binding
Dark-field correction is used to correct for the background light, which is detected even without any light source. To facilitate subtraction, the dark-field acquisition should have the same exposure time as the acquisition of the experiment.
Bright-field correction is used to correct for the uneven illumination of the field of, i.e. sample. In principle it is relevant mostly for transmission measurements, however, reflection/scatter of the excitation and leakage through the emission filter or very low emissive sample might result in need of bright-field correction for the fluorescence too (should be avoided however, because the major reflector and scatter is the sample itself, and therefore precise bright-field is difficult to get). The bright-field acquisition should have the same exposure time as the acquisition of the experiment.
Intensity correction for fluctuating light source intensity is applied separately in the preprocessing widget and essentially tracks intensity of corners of the camera along the volume acquisition.
Practical notes
For short exposure times on the order of 10s of ms, the motor stepping is the limiting factor in the speed of the acquisition. For longer exposure times, necessary for fluorescence imaging, the camera snap time will dominate the scan time.
If you want to acquire same datasets at different conditions, do not set zero on the rotator, and do NOT run the continuous rotation. Both will result in losing your rotator 0 posision.
Use preferably the
noRAMoption, because it speeds up the acquisition, as the time to update the viewer with the 3D volume is linearly increasing (O(n)) and can be significant for big volumes.
Demo experiment
Even without a hardware, OPT widget allows to simulate and experiment on the Shepp-Logan
phantom. Check the demo checkbox and the widget will simulate the acquisition of the phantom.
Phantom size is defined by opt steps parameter, and the full Phantom volume will be sized as
opt steps x opt steps x opt steps. The big cubes might take some time to generate.
If the rotator is connected, it will move in correct steps.
Live reconstruction is also available, which will show the reconstructed slice progress in real time.
Napari OPT preprocessing module (OPT handler)
contact: David Palecek, Teresa Correia (CCMAR, Portugal) Download OPT preprocessing napari plugin from napari-hub or PyPI. This plugin allows you to pre-process the OPT data before final reconstruction step. So far it provides following functionalities which are documented in detail in the plugin documentation:
Dark-field correction
Bright-field correction
Bad pixel correction
Intensity correction
Fluorescence Bleaching correction
ROI selection
Binning
log transformation (for transmission or visualization purposes)
Any subset of pre-processing steps is valid and should be functional. Correction images are in separate layers, and can be loaded from any napari compatible files, as well as the OPT data itself.
Please open feature requests or issues on the plugin github page.
Napari deep learning reconstruction (ToMoDL)
contact: Marcos Obando (CWI), Teresa Correia (CCMAR, Portugal)
For the reconstruction of the OPT data, we provide a deep learning reconstruction plugin for Napari, which includes also standard Filter Back Projection (FBP) reconstruction. The plugin is available at napari-hub. The plugin preprocessing steps partially overlap with the OPT preprocessing plugin, but the reconstruction is the main focus of this plugin. Please open issues or feature requests on the ToMoDL github repo.
COR axis alignment
Volume reshaping (interpolation on desired shape)
Clip reconstruction to the circular edge
Batch processing
2D or 3D reconstruction
filtering
Reconstruction method (with CPU and GPU support)